21. Статические
характеристики адаптации и линеаризованные модели адаптивного регулятора с эталонной
моделью
Проводя преобразования структурной схемы
связной линеаризованной адаптивной системы управления,
получаем схемы координатного (рис. 11, а) и параметрического (рис. 11, б) каналов. На
рис. 11 F1 и F2 —
собственные приведенные координатные возмущения, F1 и F2 — приведённые
координатные возмущения соседних каналов ;
![]()
![]()
а индекс «В» означает варьированное
значение переменной.
|
связей через
соседние каналы |
Входы каналов обозначены
точками / и 3, а их
выходы (в приращениях соответствующих
координат) — точками 2
к 4. Структурные схемы изображены в
таком виде, который позволяет каждый разомкнутый канал двухмерной
системы представить в виде последовательного
соединения структуры изолированного разомкнутого канала и так
называемой присоединенной структуры, которая не содержит элементов
структуры изолированного канала, за исключением элементов, общих для
обеих структур. Присоединенные структуры выделены пунктирной линией и
полностью характеризуют влияние, оказываемое связью через
соседний канал, на динамические характеристики рассматриваемого
канала.
Соответствующие указанным структурам
присоединенные передаточные функции V![]() (s) (канал 1) и
V11 (в)
(канал //) позволяют выяснить те новые свойства динамических
характеристик обоих каналов,
которые обусловлены их взаимосвязью.
(s) (канал 1) и
V11 (в)
(канал //) позволяют выяснить те новые свойства динамических
характеристик обоих каналов,
которые обусловлены их взаимосвязью.
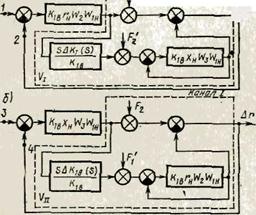
Рисунок
11-Структурные схемы координатного (а) и параметрического (б) каналов с учётом
связей через соседние каналы
На основании структурных
схем каналов (рис. 11) можно составить следующие выражения для передаточных
функций V![]() и V
и V![]()
![]() (14)
(14)
![]() (15)
(15)
Вследствие того что коэффициент
усиления в каждом канале заранее не известен, удобно строить
семейства присоединенных частотных характеристик, зависящие от двух параметров:
значения коэффициента усиления разомкнутого изолированного канала
и относительной вариации параметра а. При этом количество необходимых
вычислений можно сократить, если значение шага варьируемого
коэффициента усиления принять равным величине а.