5.Преобразователи неэлектрических параметров
ТП. Индуктивные датчики.
Чувствительные элементы,
преобразующие контролируемую или регулируемую величину в выходной сигнал,
удобный для дистанционной передачи или дальнейшей обработки, называют
датчиками.
Обычно в системах
автоматического управления для передачи информации используются электрические
сигналы. Поэтому широко применяются датчики, преобразующие неэлектрический
сигнал в электрический. Датчики могут
классифицироваться по назначению: датчики температуры, давления, уровня,
линейных и угловых перемещений, состава веществ, оптических величин и т. п.
Возможна классификация и по параметру датчика, изменяющемуся в результате
преобразования измеряемой величины, — датчики активного сопротивления, емкостные,
индуктивные и т. п.
Емкостные датчики. Принцип
действия емкостных датчиков основан на преобразовании линейных или
угловых перемещений в изменение емкости конденсатора. Ёмкость С любого плоского конденсатора равна
|
|
![]() (1)
(1)
где ![]() 0 — диэлектрическая проницаемость вакуума, равная
8,85х
0 — диэлектрическая проницаемость вакуума, равная
8,85х ![]()
![]() Ф/м;
Ф/м; ![]() — диэлектрическая .проницаемость
среды между пластинами; S — площадь перекрытия пластин, м2;
— диэлектрическая .проницаемость
среды между пластинами; S — площадь перекрытия пластин, м2; ![]() — зазор между пластинами, м.
— зазор между пластинами, м.
Относительная чувствительность плоского
емкостного датчика с переменным зазором
![]() (2)
(2)
Емкость датчика углового перемещения
![]() (3)
(3)
где S — площадь
перекрытия пластин при ![]() = 0;
= 0; ![]() — угол поворота пластины.
— угол поворота пластины.
Чувствительность такого датчика
![]() (4)
(4)
Из формулы видно, что емкость датчика можно изменять, изменяя зазор
между пластинами, площадь перекрытия пластин или диэлектрическую
проницаемость диэлектрика
Так как сила электростатического
взаимодействия между пластинами очень мала, то рассматриваемые
датчики находят широкое применение и тех случаях,
когда недопустимы большие измерительные усилия. Они удобны
для измерения вибраций с высокой частотой. Все емкостные
датчики работают на переменном токе повышенной частоты (до 1000 Гц), что
является их недостатком, так как усложняется схема из-за
необходимости устранения паразитных емкостей. В настоящее время
разработаны датчики с переменной площадью, работающие на частоте 500
Гц.
Наиболее распространенными
схемами включения емкостных датчиков являются контурные и мостовые
схемы. Последние в основном
применяются с дифференциальными емкостными преобразователями.
Это дает возможность получить большую чувствительность при
компенсации некоторых вредных внешних факторов (например,
температуры). Емкости дифференциального датчика ![]() и
и ![]() включаются в
соседние плечи моста; в два других плеча включаются или взаимосвязанные
индуктивности, или полуобмотки трансформатора
источника питания
включаются в
соседние плечи моста; в два других плеча включаются или взаимосвязанные
индуктивности, или полуобмотки трансформатора
источника питания ![]() , или низкоомные сопротивления. Для исключения влияния
емкостей кабеля в схеме предусматривают специальные меры. Сигнал
на выходе
, или низкоомные сопротивления. Для исключения влияния
емкостей кабеля в схеме предусматривают специальные меры. Сигнал
на выходе ![]() , такого моста практически линейно зависит от
изменения емкости датчика.
, такого моста практически линейно зависит от
изменения емкости датчика.
|
|

Рисунок
1-Емкостной датчик углового перемещения
|
|
|
|
![]()
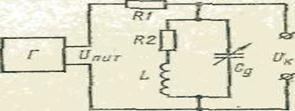
Схема включения емкостного датчика в контурную цепь
показана на рис, 2, где LC — контур,
емкость ![]() которого образована
датчиком и питается от генератора Г стабильной частоты. Вследствие
изменения емкости датчика изменяется напряжение
которого образована
датчиком и питается от генератора Г стабильной частоты. Вследствие
изменения емкости датчика изменяется напряжение ![]() на настроенном контуре.
на настроенном контуре.
|
|
|
|
|
|
Рисунок
2-Схема включения емкостного датчика в резонансный контур
Ответ22
Индуктивные датчики. Индуктивные датчики
предназначены измерения угловых и
линейных перемещений, которые преобразуются в изменение
индуктивности. Так как управляющим устройством такого датчика
является реактивное сопротивление, то питание схемы осуществляется
от источника переменного тока.
Индуктивные датчики не имеют трущихся контактов, поэтому в
сравнении с потенциометрическими они обладают большей
надежностью и более высокой чувствительностью Схема простейшего
индуктивного датчика с подвижным якорем приведена на рис. 3
|
|
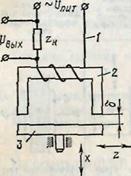
Рисунок 3-Индуктивный датчик
Этот датчик представляет собой катушку
L, размещенную на
сердечнике 2 из ферромагнитного материала. Обмотка в
простейшем случае включена в цепь переменного питания
последовательно с сопротивлением нагрузки zн.
При перемещении якоря 3 в направлении х изменяются зазор
6 и индуктивное сопротивление датчика. Индуктивность датчика,
приведенного на рис. 3,
![]() (5)
(5)
где ![]() число витков
обмотки; Zм - полное магнитное сопротивление цепи, 1/Гн;
число витков
обмотки; Zм - полное магнитное сопротивление цепи, 1/Гн;
![]() и хм — активная и реактивная составляющие
магнитного сопротивления цепи, 1/Гн;
и хм — активная и реактивная составляющие
магнитного сопротивления цепи, 1/Гн; ![]() — магнитное сопротивление воздушного
зазора, 1/Гн, равное
— магнитное сопротивление воздушного
зазора, 1/Гн, равное
![]() (6)
(6)
где ![]() — величина воздушного
зазора, м;
— величина воздушного
зазора, м; ![]() — площадь зазора, м2;
— площадь зазора, м2; ![]() —
магнитная проницаемость воздуха,
равная 4
—
магнитная проницаемость воздуха,
равная 4![]() -
-![]() Гн/м.
Гн/м.
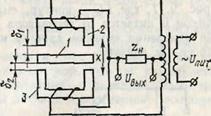
Рнсунок 4
Схема дифференциального индуктивного датчика
Пренебрегая в формуле (5)
сопротивлением магнитопровода, которое мало в
сравнении с сопротивлением ![]() , получаем
, получаем
![]() (7)
(7)
Из этой формулы следует,
что зависимость индуктивности датчика от величины зазора нелинейна Приближенно в диапазоне изменения зазора от 0,1 до 0,15
б0 (![]() 0 — начальный зазор)
характеристику можно считать линейной. Поэтому описанные датчики нашли
применение для измерения малых перемещений
— от единиц микрометров до единиц миллиметров. Если якорь датчика перемещается в направлении z ,
то его индуктивность изменяется в зависимости от изменения площади зазора.
Эта зависимость линейна. Такие датчики позволяют измерять перемещения
в несколько сантиметров.
0 — начальный зазор)
характеристику можно считать линейной. Поэтому описанные датчики нашли
применение для измерения малых перемещений
— от единиц микрометров до единиц миллиметров. Если якорь датчика перемещается в направлении z ,
то его индуктивность изменяется в зависимости от изменения площади зазора.
Эта зависимость линейна. Такие датчики позволяют измерять перемещения
в несколько сантиметров.
Для получения линейной характеристики в
большом диапазоне изменения зазора L = f(б) используют реверсивные
схемы (дифференциальные индуктивные датчики). Когда якорь L находится
в среднем положении, т. е. ![]() = б2 =
= б2 = ![]() , то индуктивности обеих катушек 2 и
3 одинаковы и выходное напряжение
, то индуктивности обеих катушек 2 и
3 одинаковы и выходное напряжение ![]() , равно нулю. При отклонении якоря в какую-либо сторону на выходе датчика появляется напряжение
, равно нулю. При отклонении якоря в какую-либо сторону на выходе датчика появляется напряжение![]() , которое возрастает с увеличением х. При изменении направления перемещения х фаза выходного напряжения изменяется на 180'. Характеристика датчика
, которое возрастает с увеличением х. При изменении направления перемещения х фаза выходного напряжения изменяется на 180'. Характеристика датчика ![]() x) представлена на
рнс.5. Параметры датчика выбираются так, чтобы в допустимых
пределах изменения х зависимость
x) представлена на
рнс.5. Параметры датчика выбираются так, чтобы в допустимых
пределах изменения х зависимость ![]() = f(x) была
линейна.
= f(x) была
линейна.
Чувствительность дифференциального
датчика примерно в два раза выше по сравнению с рассмотренным выше простейшим
датчиком (см. рнс. 9.18). С точки
зрения динамики индуктивные датчики рассматриваются как
безынерционные звенья.
|
|

Индуктивные датчики с переменной
площадью зазора более универсальны, чем с переменным зазором. Они находят
широкое применение
в авиации, так как удовлетворительно работают при частоте бортовой сети. Конструктивное исполнение индуктивных датчиков различно. Обычно индуктивные датчики
работают при частотах, не превышающих
5000 Гц, так как на более высоких частотах возрастают потери на перемагничиванне.
Рисунок 5-Характеристика
дифференциального индуктивного датчика
Для измерения угловых перемещений
используется дифференциальный трансформаторный датчик с поворотным
движением якоря. На среднем стержне 1 расположена обмотка,
подключенная к источнику питания. Вторичные обмотки расположены на
крайних стержнях 2, 3 и соединены так, что наводимые в них ЭДС
сдвинуты по фазе на 180". При нулевом положении якоря (отсутствует
изменение углового перемещения х) ЭДС во вторичных
катушках равны и выходное напряжение равно нулю. При отклонении якоря от нулевого положения появляется выходное напряжение, фаза которого зависит от
направления углового перемещения х.