35)Типовые
воздействия. Показатели качества
Устойчивость
является необходимым, но недостаточным условием 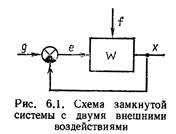 работоспособности систем автоматического
управления. К ним предъявляются определенные требования качества. Наиболее
полной
работоспособности систем автоматического
управления. К ним предъявляются определенные требования качества. Наиболее
полной
характеристикой
качества систем автоматического управления является текущая ошибка е' (t) = x (t) — х0
(t) или
е (t) = х0
(t) — x (t) (6.1)
где х0 (t) — заданное (невозмущенное) движение; х
(t) —
фактическое (возмущенное) движение.
Ошибки
е' (t) и е (t) отличаются только знаком. Использование ошибки е (t), определяемое соотношением
(6.1), связано с тем, что при ![]() [
[![]() задающее воздействие] она совпадает с величиной на выходе
сравнивающего устройства, если к нему не приложено возмущение.
задающее воздействие] она совпадает с величиной на выходе
сравнивающего устройства, если к нему не приложено возмущение.
Пусть
на систему действуют два внешних воздействия: задающее воздействие ![]() и возмущение
и возмущение ![]() (рис. 6.1), причем
(рис. 6.1), причем ![]() .
.
Так
как x (t) = Wxg (p) g (t) + Wxf (p) f (t), то
e (t) = g (t) – x(t) = Weg (p) g (t) – Wxf (p) f (t),
(6.2)
где Weg (p) = 1 – Wxg (p).
Напомним,
что Wxg (p), Wxf (p), Weg (p) — передаточные функции системы (в
операторной форме), причем первый индекс снизу указывает на выходную, а второй
индекс — на входную величины, относительно которых определяются эти
передаточные функции.
Представим
ошибку в виде суммы ![]() , где
, где ![]() ошибка, обусловленная
входным задающим воздействием
ошибка, обусловленная
входным задающим воздействием ![]() (ошибка от
задающего воздействия);
(ошибка от
задающего воздействия); ![]() — ошибка,
обусловленная входным возмущением
— ошибка,
обусловленная входным возмущением ![]() (ошибка от
возмущения). Ошибки от задающего воздействия и возмущения определяются
независимо друг от друга: при определении
(ошибка от
возмущения). Ошибки от задающего воздействия и возмущения определяются
независимо друг от друга: при определении ![]() можно принять
можно принять ![]() , а при определении
, а при определении ![]() — воздействие g (t) = 0.
— воздействие g (t) = 0.
Из
(6.2) следует, что
![]() ;
(6.3)
;
(6.3)
![]() ;
(6.4)
;
(6.4)
Если
возмущение ![]() приложено не в точке
приложения задающего воздействия, то ошибку от возмущения можно также определить
по формуле
приложено не в точке
приложения задающего воздействия, то ошибку от возмущения можно также определить
по формуле
![]() (6.5)
(6.5)
Если
возмущение приложено в одной точке с задающим воздействием, то по формуле
(6.5) определяется не ошибка от возмущения, а разность:
Типовые воздействия. Ошибка е (t) зависит как от свойства системы, так и от вида входных воздействий.
Для одной и той же системы она различна в зависимости от входных воздействий.
Поэтому при определении качества системы используют так называемые типовые
воздействия, в
качестве которых обычно принимают ступенчатое воздействие
![]() линейно изменяющееся
воздействие
линейно изменяющееся
воздействие ![]()
![]() , гармоническое воздействие
, гармоническое воздействие ![]() и др.
и др.
Качество системы в переходном и
установившемся режимах.
Различают качество системы в переходном и установившемся режимах. Под
качеством системы в переходном режиме понимают свойство системы на
начальном отрезке времени [t0, t] (t0 — момент приложения на систему воздействия); под качеством системы
в установившемся режиме — свойство системы в асимптотике при ![]() .
.
Для
оценки качества в переходном режиме используют ступенчатое воздействие ![]() . Вид кривой переходного процесса не зависит от величины А0; обычно принимают А0 = 1.
При этом
. Вид кривой переходного процесса не зависит от величины А0; обычно принимают А0 = 1.
При этом
![]()
![]() ,
,
где ![]() и
и ![]() — переходные
функции [hg (t) = x (t) при g (t) = 1(t) и f (t) = = 0; hf (t) при f (t) = 1(t) и g (t) = 0].
— переходные
функции [hg (t) = x (t) при g (t) = 1(t) и f (t) = = 0; hf (t) при f (t) = 1(t) и g (t) = 0].
Из
приведенных соотношений видно, что о качестве системы в переходном режиме можно
судить по переходным функциям hg (f) и hf (t) или переходным характеристикам.
Показатели
качества. Оценивать качество систем и сравнивать их между собой по текущим
ошибкам и переходным функциям неудобно. Поэтому для оценки качества систем
используют числовые показатели, которые называют показателями качества и
которые так или иначе определяют характерные свойства
ошибок и переходных характеристик.
Показатели
качества в переходном режиме делятся на прямые и
косвенные. Прямыми называются показатели качества, которые определяют
непосредственно по переходной характеристике. Все остальные показатели качества
называют косвенными.
Изложенные
здесь понятия и определения для непрерывной системы в равной степени относятся
и к импульсным системам.